


- Uporabljeni kabel
- Navodila za preverjanje
- Oscilografija K-CAN, PT-CAN, F-CAN
- Vrstni red merjenja upora z ustreznimi upornostmi K-CAN, PT-CAN in F-CAN
- K-CAN
- PT-CAN, F-CAN
- Opomba!
- CAN bus ne deluje
Наши партнеры ArtmMisto
Ta priročnik se uporablja za preverjanje, ali se signal visokega nivoja CAN in nizka raven signala CAN pravilno prenašata na povezavo vodila.
Uporabljeni kabel
Večfunkcijski kabel
Navodila za preverjanje
- Preizkus napetosti (osciloskop): Za preverjanje napetosti je treba baterijo priključiti in vklopiti vžig.
- Merjenje upora: Pri merjenju upora je treba pred meritvijo izprazniti predmet, ki ga je treba izmeriti. Če želite to narediti, je baterija odklopljena. Počakajte 3 minute, da se vsi kondenzatorji v sistemu izpraznijo.
Informacije o CAN
Avtobus CAN (Controller Area Network) je serijski sistem vodil z naslednjimi funkcijami:
- širjenje signala poteka v obe smeri.
- Vsako sporočilo prejmejo vsi naročniki avtobusov. Vsak naročnik avtobusa se odloči, ali bo uporabil sporočilo,
- Dodatni naročniki na avtobus se dodajo s preprosto vzporedno povezavo.
- Avtobusni sistem tvori sistem z gonilnikom. Vsak naročnik vodila je lahko gonilnik ali aktuator, odvisno od tega, ali je priključen kot oddajnik ali sprejemnik.
- Kot prenosni medij se uporablja dvožična povezava. Oznake žic: CAN nizko in CAN visoko.
- Praviloma lahko vsak naročnik avtobusa prek avtobusa komunicira z vsemi drugimi naročniki avtobusov. Izmenjavo podatkov na vodilu urejajo pravila dostopa. Glavna razlika med vodilom podatkov K-CAN (karoserija CAN bus), vodilom PT-CAN (motor in vodila CAN) in vodilom F-CAN (šasija CAN vodilo) je:
- K-CAN: hitrost prenosa podatkov pribl. 100 Kbps Možna je ena žica.
- PT-CAN: hitrost prenosa podatkov pribl. 500 Kbps Način z eno žico ni mogoč.
- F-CAN: hitrost prenosa podatkov pribl. 500 Kbps Način z eno žico ni mogoč.
Voznik: Voznik je aktivni komunikacijski partner, iz katerega izvira komunikacijska pobuda. Voznik ima prednost in nadzoruje komunikacijo. Preko avtobusnega sistema lahko pošlje sporočila naročniku pasivnega vodila (aktuator) in na zahtevo prejme njegova sporočila.
Krmilnik: sprožilec je pasivni komunikacijski član. Prejema ukaz za sprejem in prenos podatkov.
Sistem z glavno napravo: v sistemu z glavno napravo lahko udeleženci v komunikaciji v določenem trenutku prevzamejo vlogo glavnega ali aktuatorja.
Oscilografija K-CAN, PT-CAN, F-CAN
Za večjo jasnost, ali CAN-bus deluje brezhibno, morate paziti na komunikacijo vodila. Hkrati ni treba analizirati posameznih bitov, ampak morate samo zagotoviti, da vodilo CAN deluje. Oscilografija kaže: "CAN vodila očitno delujejo brez motenj".
Pri merjenju z napetostnim osciloskopom CAN (ali visok CAN-High) nizkonapetostna žica in ozemljitev sprejmeta kvadratni valovni signal v napetostnem območju:
K-CAN:
Nizek nivo CAN glede na maso: U min = 1 V in U max = 5 V
Visok nivo CAN glede na maso: U min = 0 V in U max = 4 V
Te vrednosti so približne in se lahko, odvisno od obremenitve vodila, razlikujejo do 100 mV.
Nastavitve osciloskopa za merjenje na K-CAN:
CH1: Sonda 1, uvrstitev 2 B / div; DC DC2 povezava: Sonda 2, razred 2 V / div; DC čas: 50 ms / div
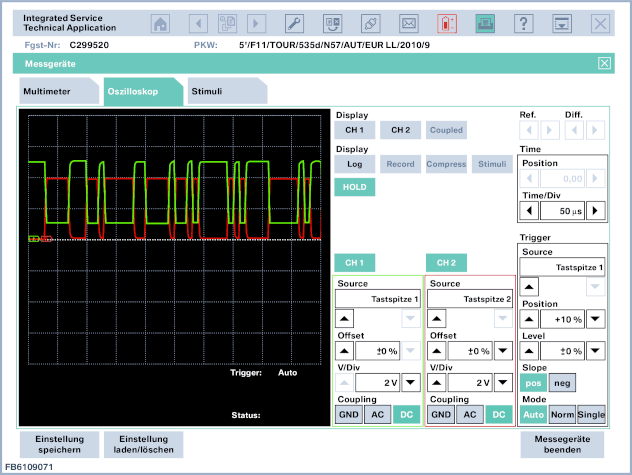
Sl. 1: meritev K-CAN: CH1 nizka raven CAN, CH2 visoka raven CAN
Pri merjenju z napetostnim osciloskopom CAN (ali visok CAN-High) nizkonapetostna žica in ozemljitev sprejmeta kvadratni valovni signal v napetostnem območju:
PT-CAN in F-CAN
Nizek nivo CAN glede na maso: U min = 1,5 V in U max = 2,5 V
Visok nivo CAN glede na maso: U min = 2,5 V in U max = 3,5 V
Te vrednosti so približne in se lahko, odvisno od obremenitve vodila, razlikujejo do 100 mV.
Nastavitve osciloskopa za PT-CAN (ali F-CAN) merjenje:
CH1: Sonda 1, uvrstitev 1 B / div; DC DC2 povezava: Sonda 2, razred 1 V / div; DC priključek Čas: 10 ms / div 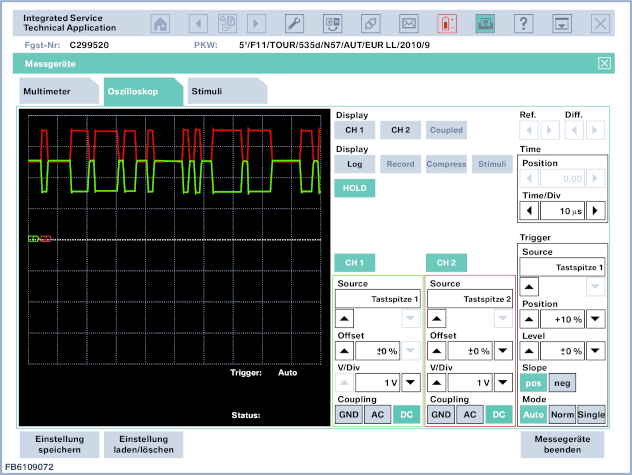
Slika 2: Meritev PT-CAN: CH1 nizek CAN, CH2 visok CAN
Vrstni red merjenja upora z ustreznimi upornostmi K-CAN, PT-CAN in F-CAN
Postopek preverjanja merjenja upora:
- CAN-vodila morajo biti izklopljena
- Nobenih drugih merilnih naprav ne bi smeli biti priključeni (vzporedna povezava merilnih naprav)
- Merjenje poteka med CAN in nizkimi vodniki.
- Dejanske vrednosti se lahko od določenih vrednosti razlikujejo za več ohmov.
K-CAN
Na vodilu K-CAN ni mogoče izvesti ločene meritve upora, saj se upor razlikuje glede na logiko vklopa računalnika!
PT-CAN, F-CAN
Za preprečitev odboja signala sta dva naročnika vodila CAN (z največjo razdaljo v omrežju PT-CAN) naložena z upornostjo 120 Ohm. Oba upora bresa sta vzporedno povezana in tvorita enakovredni upor 60 omov. Če je napajalna napetost odklopljena, je mogoče enakovredno upornost izmeriti med podatkovnimi vodi. Poleg tega lahko posamezne odpornosti merimo posamično.
Navodila za merjenje z odpornostjo 60 ohmov: iz pnevmatike izključite lahko dostopen računalnik. Izmerite upor na priključku med nizkimi in visokimi žicami CAN.
Opomba!
Vsi avtomobili nimajo končnega upora na vodilu CAN. Prisotnost vgrajenega zaključnega upora na priključenem vozilu je mogoče preveriti s pomočjo ustrezne sheme ožičenja.
CAN bus ne deluje
Če podatkovna vodila K-CAN ali PT-CAN ne delujejo, je morda kratek stik ali pretrgan kabel visoke ali nizke CAN. Ali okvarjen ECU.
Za lokalizacijo vzroka napake priporočamo, da nadaljujete na naslednji način:
- Naročnike naročnikov vodila CAN izključite, dokler ne odkrijete bloka, ki je vzrok za okvaro (= ECU X).
- Preverite, ali imajo kabli do računalnika X kratki stik ali odprti stik.
- Če je mogoče, preverite ECU X.
- Takšno zaporedje dejanj vodi do uspeha le, če ima kratki stik preverljivo žico od računalnika do vodila CAN. Če ima žica v vodilu CAN kratek stik, potem morate preveriti kabelski snop.
Pridržujemo si pravico do tipografskih napak, semantičnih napak in tehničnih sprememb.


