


- Зв'язок між способом пересування риб і поліпшенням водних конструкцій
- Створення віртуального акваріума для вивчення техніки плавання риб
- Рішення задач FSI-моделювання в середовищі COMSOL Multiphysics
Наши партнеры ArtmMisto
Дослідження способів пересування риб дозволяє вченим проектувати транспортні засоби та роботів, які зможуть плавати і орієнтуватися в водному середовищі. Виконання таких досліджень вимагає аналізу взаємодії тіла риб з навколишнім їх рідиною. За допомогою середовища COMSOL Multiphysics дослідникам з Університету Рома Тре вдалося змоделювати карангіформний тип локомоції - особливого способу пересування риби, і детально проаналізувати його динаміку.
Зв'язок між способом пересування риб і поліпшенням водних конструкцій
За мільйони років еволюції риби придбали здатність швидко і легко пересуватися у водному середовищі, яка стала для них рідною стихією. Пересування в подібних середовищах, як ми вже відзначали раніше в блозі - складне завдання для створених людьми транспортних засобів і роботів, оскільки в каламутній воді в умовах слабкої освітленості дуже складно орієнтуватися. Для вирішення цього завдання люди часто черпають нові ідеї, спостерігаючи за рибами.

Вивчення техніки плавання риб дозволяє знайти оптимальні рішення при проектуванні водного транспорту. Зображення надано Jim and Becca Wicks - Snap of Snapper !. Ліцензія CC BY 2.0 , в Wikimedia Commons .
Дослідники з Корнелла, наприклад, розробляють пластичного робота , Який буде плавати як мінога (дивись нижче). Рибоподібних робот використовує просту техніку плавання міноги для самостійного пересування і вивчення простору, зокрема, в океанах супутника Юпітера, Європи.

Мінога є одним з видів риб, чия поведінка надихає розвиток водних роботів. Зображення надано Tiit Hunt - Власна робота. Ліцензія CC BY-SA 3.0 , в Wikimedia Commons .
Для створення таких роботів інженерам необхідно розуміти, як риби пересуваються у водному середовищі. Допомогти їм у цьому можуть FSI-дослідження (дослідження взаємодії рідини і твердих тіл), в рамках яких розраховуються поле швидкості і тиску рідини, а також напруги і деформації в тілі риби. Аналізуючи вплив рідкого середовища на пересування риби, і навпаки, вплив рухів тіла риби на потік рідини, дослідники можуть отримати точні і корисні результати.
Сьогодні ми розглянемо, як група вчених з Університету Рома Тре використовувала FSI-моделювання в середовищі COMSOL Multiphysics для дослідження способів пересування риб, основні результати якого були опубліковані в статті "Віртуальний акваріум: моделювання техніки плавання риб" . Вони представили своє дослідження на Конференції спільноти COMSOL-2015 Греноблі, отримавши нагороди за кращу статтю і кращий стенд конференції.
Створення віртуального акваріума для вивчення техніки плавання риб
Вчені використовували двовимірний підхід для аналізу пересування риби, вільно плаває в рідкому середовищі. Вони моделювали взаємодія між тілом риби (тверде тіло) і навколишнього солоною водою (рідина). Також вчені моделювали скорочення м'язів риби, використовуючи поняття збурень. Сьогодні ми розглянемо методику FSI-моделювання, яку вони використовували в своїх дослідженнях.
Дослідження було присвячено аналізу карангіформного типу локомоції, - різновиди руху риби, при якому її м'язи хвилеподібно скорочуються від голови до хвоста. В анімаційному ролику показано, що рухи, що здійснюються хвостом, перетворюють його в двигун і створюють локальну тягу і імпульсну струмінь. В результаті виникає рушійна сила, яка і штовхає рибу вперед.
Карангіформний тип локомоції плавання риби.
У своїй роботі група дослідників проаналізувала карангіформний тип локомоції в різні моменти часу. При переміщенні риби всередині віртуального акваріума навколишнє її розрахункова сітка деформується, як показано на малюнках. В результаті при русі виникають настільки великі деформації, що для виконання завдання потрібно метод автоматичного перестроювання сітки. Дослідникам вдалося вирішити задачу за допомогою інтерфейсу Fluid-Structure Interaction за рахунок використання рухомого сітки для коротких проміжків часу і автоматичного перестроювання сітки для більш тривалих інтервалів.
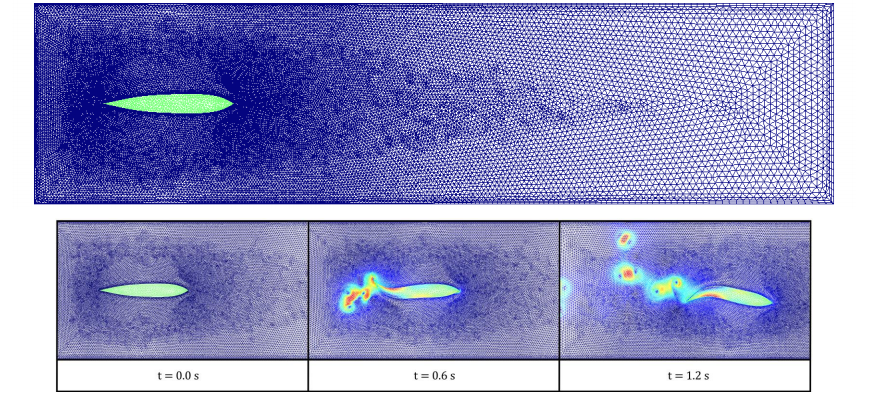
Сітки, використовувані для аналізу техніки плавання риб. Зображення надано M. Curatolo and L. Teresi і взято з їх презентації на Конференції спільноти COMSOL-2015 Греноблі.
Методи адаптації сітки, згадані вище, дозволили вченим ретельно вивчити вплив рухів тіла риби на рідку середу, в тому числі ефекти в гідродинамічному сліді. Коли тверде тіло, наприклад риба, пересувається в рідкому середовищі, воно створює за собою гідродинамічний слід або, іншими словами, зону обуреного потоку. Дослідницька група використовувала COMSOL Multiphysics для вивчення структури течії в сліді та аналізу вихорів, що генеруються при карангіформном плаванні. Вчені виявили, що кожен рух риб'ячого хвоста генерує вихори, і що взаємне відстань між центрами вихорів не змінюється.
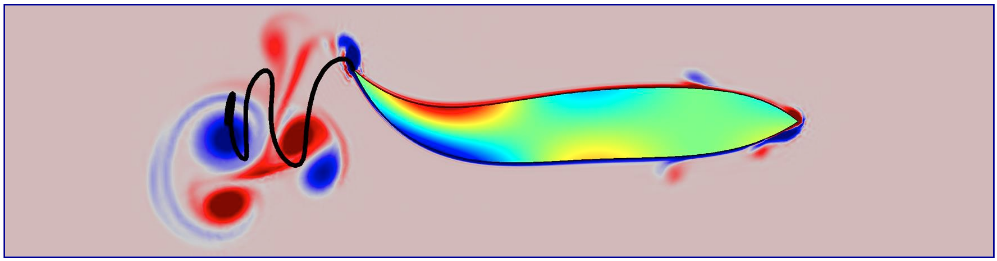
Вихори і гідродинамічний слід, які з'являються, як тільки риба починає плисти. Зображення надано M. Curatolo and L. Teresi і взято з їх презентації на Конференції спільноти COMSOL-2015 Греноблі.
Приклад вихорів і гідродинамічного сліду.
Щоб краще зрозуміти, як навколишнє солона вода і тіло риби взаємодіють один з одним, дослідники також розрахували підйомну силу і силу лобового опору . Результати розрахунків показали хороше відповідність між компонентами швидкості хвоста і підйомної і буксирує силами.
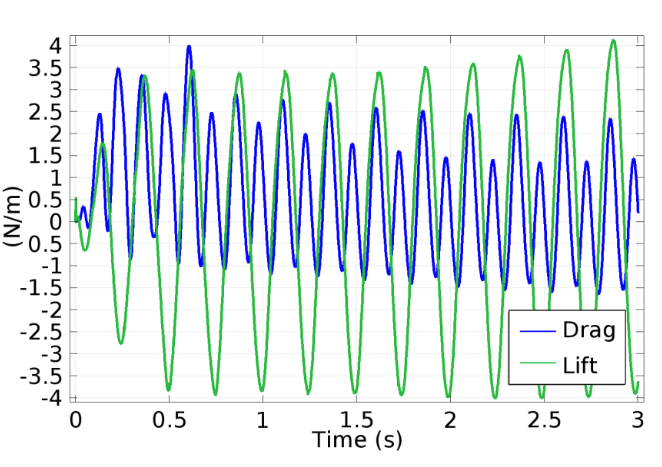
Зліва: Графік порівняння компонент швидкості хвоста. Справа: Графік порівняння підйомної сили і сили лобового опору. Зображення надано M. Curatolo and L. Teresi і взято з їх презентації на Конференції спільноти COMSOL-2015 Греноблі.
Порівняння результатів моделювання з натурними вимірами показало задовільний згоду. Дослідники сподіваються, що результати їх моделювання посприяють прогресу у вивченні способів пересування риб.
Рішення задач FSI-моделювання в середовищі COMSOL Multiphysics
Моделювання плавання риб є всього лише одним із прикладів складних завдань, які можна вирішувати за допомогою інструментів FSI-моделювання середовища COMSOL Multiphysics. Такі інструменти дозволять вам моделювати безліч різних пристроїв - від змішувачів і проточних труб до коливальних структур в рідинах і пружно-пористих середовищах.
Ви хочете дізнатися про інших типах завдань FSI-моделювання, які можна вирішувати в середовищі COMSOL Multiphysics? Тоді обов'язково прочитайте статтю блогу , В якій представлений корисний огляд таких завдань. Ми також рекомендуємо Вам ознайомитись з запис вебінару по FSI-моделювання або завантажити одну з навчальних моделей Галереї додатків, наприклад ось цю .
Примітка редактора: Відповідна модель і необхідні файли були додані в Model Exchange 2/21/2017. Ви можете знайти їх тут .


